
 在線客服
在線客服
 企業微信
企業微信


核心提示:CLARI目前仍處于起步階段,但在不久的將來,這些小型機器人就能獨立爬行到噴氣發動機的內部或倒塌建筑物的廢墟里。
原標題:微型機器人能自我變形擠進狹窄空間
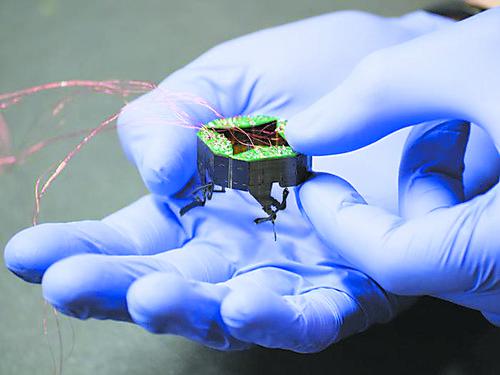
CLARI的重量比一個乒乓球還要輕,一個手掌就可裝下數個。圖片來源:科羅拉多大學博爾德分校
科技日報記者 張夢然
據《先進智能系統》雜志30日報道,美國科羅拉多大學博爾德分校工程師團隊展示了一種微型變形機器人CLARI,其可改變形狀擠過狹窄的間隙。它的設計靈感來自于昆蟲世界,未來或能以全新的方式為重大災難后的救援人員提供幫助。
CLARI的重量小于乒乓球,幾個機器人都可輕松地放在手掌中。當周圍環境變得狹窄時,CLARI可從方形變為細長。CLARI有4條腿,但其允許工程師混搭其附肢,產生一些“狂野”的蠕動機器人——譬如可在網上行走的八足蜘蛛式機器人。
CLARI目前仍處于起步階段,但在不久的將來,這些小型機器人就能獨立爬行到噴氣發動機的內部或倒塌建筑物的廢墟里。
目前最基本的形式中,CLARI的形狀似一個正方形,4個邊各有一條腿。然而,通過改變CLARI,它可像螃蟹一樣壓得更寬,也可像蜈蚣一樣拉得更長。總之,該機器人可從約34毫米寬的方形變形為約21毫米寬的細長形狀。
CLARI的每條腿的功能幾乎就等于一個獨立的機器人,有自己的電路板和雙執行器,可前后左右移動腿,類似于人類的髖關節。理論上,這種模塊化設計可讓CLARI機器人呈現出不同的形狀。
在未來的迭代中,研究人員還會將傳感器整合到CLARI中,以便它能夠檢測障礙物并作出反應,實現在復雜的自然環境中“踢開”樹木、草葉等障礙物,或者穿過裂縫在巖石之間持續前進。




