DM542型兩相混合式步進電機驅動器
產品型號:DM542型驅動器
DM542型細分型兩相混合式步進電機驅動器,采用直流18~50V供電,適合驅動電壓18V~50V,電流小于4.0A外徑42~86毫米的兩相混合式步進電機。此驅動器采用交流伺服驅動器的電流環進行細分控制,電機的轉矩波動很小,低速運行很平穩,幾乎沒有振動和噪音。高速時力矩也大大高于其它二相驅動器,定位精度高。廣泛適用于雕刻機、數控機床、包裝機械等分辯率要求較高的設備上。
一、概述
DM542型細分型兩相混合式步進電機驅動器,采用直流18~50V供電,適合驅動電壓18V~50V,電流小于4.0A外徑42~86毫米的兩相混合式步進電機。此驅動器采用交流伺服驅動器的電流環進行細分控制,電機的轉矩波動很小,低速運行很平穩,幾乎沒有振動和噪音。高速時力矩也大大高于其它二相驅動器,定位精度高。廣泛適用于雕刻機、數控機床、包裝機械等分辯率要求較高的設備上。
主要特點
1 平均電流控制,兩相正弦電流驅動輸出
2 直流24~50V供電
3 光電隔離信號輸入/輸出
4 有過壓、欠壓、過流、相間短路保護功能
5 十五檔細分和自動半流功能
6 八檔輸出相電流設置
7 具有脫機命令輸人端子
8 電機的扭矩與它的轉速有關,而與電機每轉的步數無關
9 高啟動轉速
10.高速力矩大

二、控制信號接口
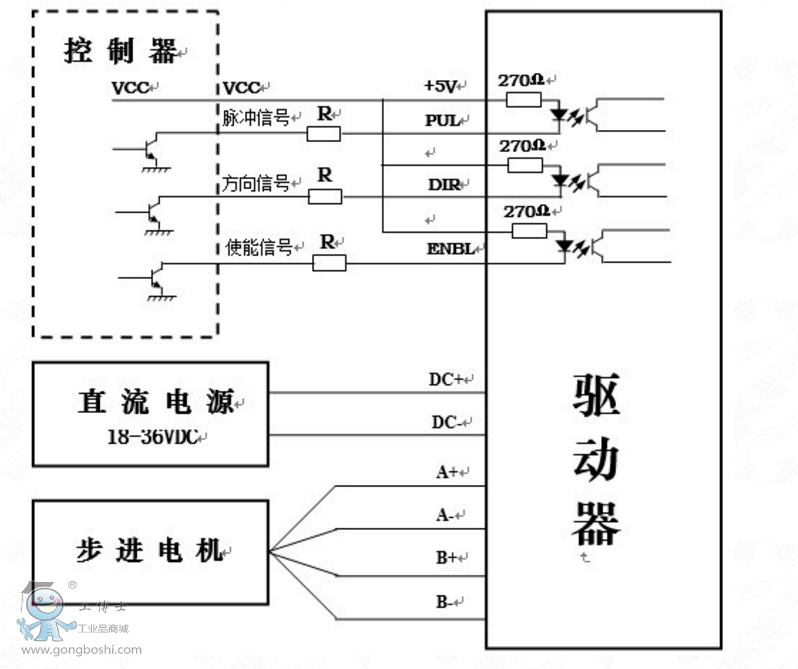
圖1是驅動器的接線原理圖
1、控制信號定義
PLS/CW+: 步進脈沖信號輸入正端或正向步進脈沖信號輸入正端
PLS/CW-: 步進脈沖信號輸入負端或正向步進脈沖信號輸入負端
DIR/CCW+: 步進方向信號輸入正端或反向步進脈沖信號輸入正端
DIR/CCW-: 步進方向信號輸入負端或反向步進脈沖信號輸入負端
ENA+: 脫機使能復位信號輸入正端
ENA-: 脫機使能復位信號輸入負端
脫機使能信號有效時復位驅動器故障,禁止任何有效的脈沖,驅動器的輸出功率元件被關閉,電機無保持扭矩。
2、控制信號連接
上位機的控制信號可以高電平有效,也可以低電平有效。當高有效時,把所有控制信號的負端連在一起作為信號地,低有效時,把所有控制信號的正端連在一起作為信號公共端。現在以集電極開路和PNP輸出為例,接口電路示意圖如下:

注意:VCC值為5V時,R短接;
VCC值為12V時,R為1K,大于1/8W電阻;
VCC值為24V時,R為2K,大于1/8W電阻;
R必須接在控制器信號端。
三、功能選擇(用驅動器面板上的DIP開關實現)
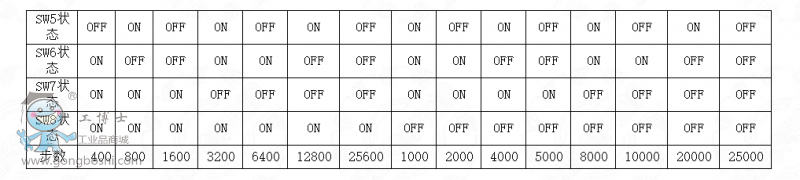
1、設置電機每轉步數
驅動器可將電機每轉的步數分別設置為400、500、800、1000、1250、1600、2000、2500、3200、4000、5000、6400、8000、10000、12800步。用戶可以通過驅動器正面板上的撥碼開關的SW5、SW6、SW7、SW8位來設置驅動器的步數(如表1):
2、控制方式選擇
撥碼開關SW4位可設置成兩種控制方式:
當設置成“OFF”時,為有半流功能。
當設置成“ON”時,為無半流功能。
3、設置輸出相電流
為了驅動不同扭矩的步進電機,用戶可以通過驅動器面板上的撥碼開關SW1、SW2、SW3位來設置驅動器的輸出相電流(有效值)單位安培,各開關位置對應的輸出電流,不同型號驅動器所對應的輸出電流值不同。具體見表2。

4、半流功能
半流功能是指無步進脈沖500ms后,驅動器輸出電流自動降為額定輸出電流的70%,用來防止電機發熱。
四、功率接口
1、+V、GND:連接驅動器電源
+V:直流電源正級,電源電壓直流16~50V。*大電流是5A。
GND:直流電源負級。
2、A+ A- B+ B-:連接兩相混合式步進電機
驅動器和兩相混合式步進電機的連接采用四線制,電機繞組有并聯和串聯接法,并聯接法,高速性能好,但驅動器電流大(為電機繞組電流的1.73倍) ,
串聯接法時驅動器電流等于電機繞組電流。
五、 安裝
周圍要有20mm的空間,不能放在其它發熱的設備旁,要避免粉塵、油霧、腐蝕性氣體,濕度太大及強振動場所。

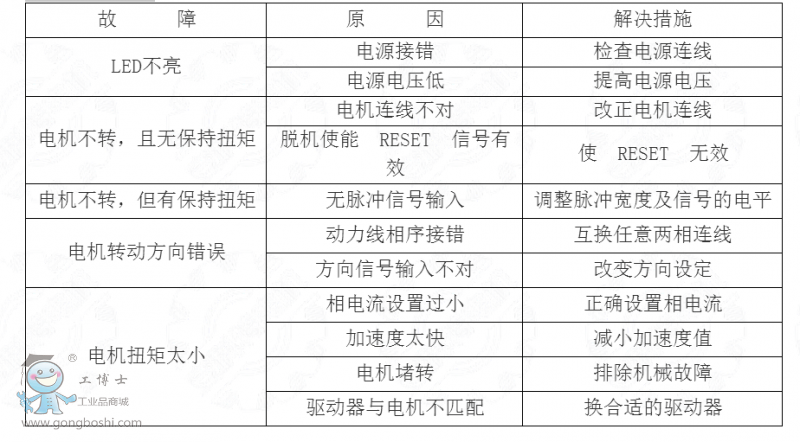
六 故障診斷
1、狀態燈指示
RUN: 綠燈,正常工作時亮。
ERR: 紅燈,故障時亮,電機相間短路、過壓保護和欠壓保護。
2、故障及排除
七、驅動器接線
一個完整的步進電機控制系統應含有步進驅動器、直流電源以及控制器(脈沖源)。以下為典型系統接線圖:


 在線客服
在線客服
 企業微信
企業微信







 通過認證
通過認證 









