| 系列 | 控制方式 |
終端接口/通信功能 |
安全功能 | ||
|---|---|---|---|---|---|
|
位置控制 | 脈沖輸入 | 無 | ||
|
位置控制 | 脈沖輸入/Modbus通信(RS485/RS232) | 無 | ||
|
位置控制, 速度控制, 轉矩控制, 全閉環控制 | 模擬/脈沖輸入/Modbus通信(RS485/RS232) | 有 | ||
|
位置控制, 速度控制, 轉矩控制 | RTEX | 無 | ||
|
位置控制, 速度控制, 轉矩控制, 全閉環控制 | RTEX | 有 |








基本規格
| 項目 | 功能 | |||
|---|---|---|---|---|
| 輸入電源 | 100 V | 主電路電源 | 單相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | |
| 控制電路電源 | 單相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | |||
| 200 V | 主電路電源 | A型~ D型 |
單相/三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |
| E型~ F型 |
三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| 控制電路電源 | A型~ D型 |
單相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||
| E型~ F型 |
單相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| 使用環境條件 | 溫度 | 使用溫度 0 ℃~55 ℃(無凍結) 保存溫度 -20 ℃~65 ℃(*高溫度保證:80 ℃ 72小時 但是無結露※1) |
||
| 濕度 | 使用、保存時都需保持在20 %~85 % RH 以下 (無結露※1) | |||
| 海拔 | 海抜1000 m 以下 | |||
| 振動 | 5.88 m/s2 以下,10 Hz ~60 Hz | |||
| 控制方式 | IGBT PWM 方式 正弦波驅動 | |||
| 編碼器反饋 | 23 bit(8388608 分辨率)7線串行絕對式編碼器 ※以增量式系統(不使用多圈數據)使用的情況下,無需連接絕對式編碼器用電池,將參數Pr0.15 設置為「1」(出廠設置)即可使用。 |
|||
| 外部位移傳感器反饋 | A/B 相原點信號差動輸入 串行通信位移傳感器對應制造商: Mitutoyo 、Heidenhain、Renishaw、Magnescale、Nidec-sankyo、Fagor Automation |
|||
| I/O 連接器 |
控制信號 | 輸入 | 通用10輸入 根據參數選擇通用輸入功能 |
|
| 輸出 | 通用6輸出 根據參數選擇通用輸出功能 |
|||
| 模擬信號 | 輸入 | 3輸入(16 bitA/D輸入1、12 bitA/D輸入2) | ||
| 輸出 | 2輸出(模擬監視器輸出2) | |||
| 脈沖信號 | 輸入 | 2輸入(光電耦合器輸入、長線接收器輸入) 通過光電耦合器輸入,可對應長線驅動器I/F開路集電極I/F 通過長線接收器輸入,可對應長線驅動器I/F |
||
| 輸出 | 4 輸出(長線驅動輸出3、開路集電極輸出1) 編碼器反饋脈沖(ABZ 相) 或者外部位移傳感器脈沖(EXA EXBEXZ 相) 通過長線驅動器輸出。 Z 相或者 EXZ 相脈沖也有開路集電極輸出。 |
|||
| 通信功能 | USB | 可連接電腦等進行參數設定以及狀態監視等。 | ||
| RS232 | 可與上位控制器進行1 :1 通信。 | |||
| RS485 | 可與上位控制器進行1 :1 通信。 | |||
| 安全功能 | 為對應功能安全的端子 | |||
| 前面板 | ①按鍵 5 個 ②LED 6 位 | |||
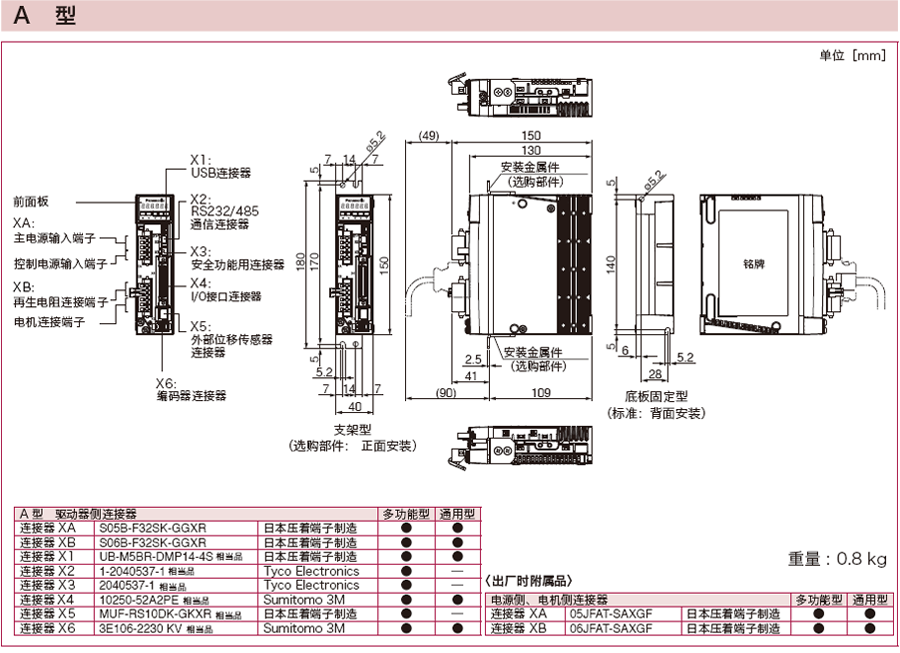
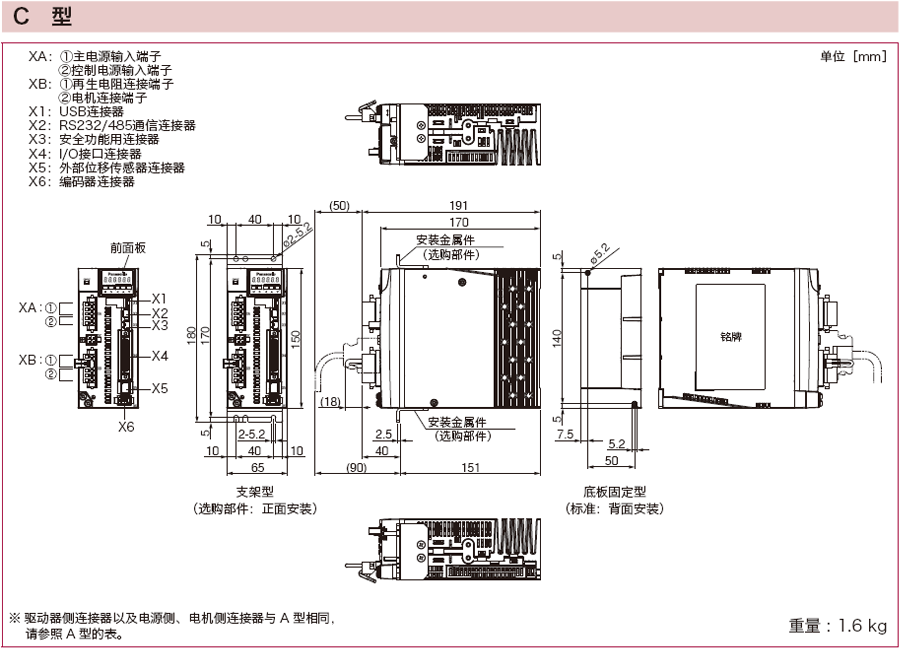
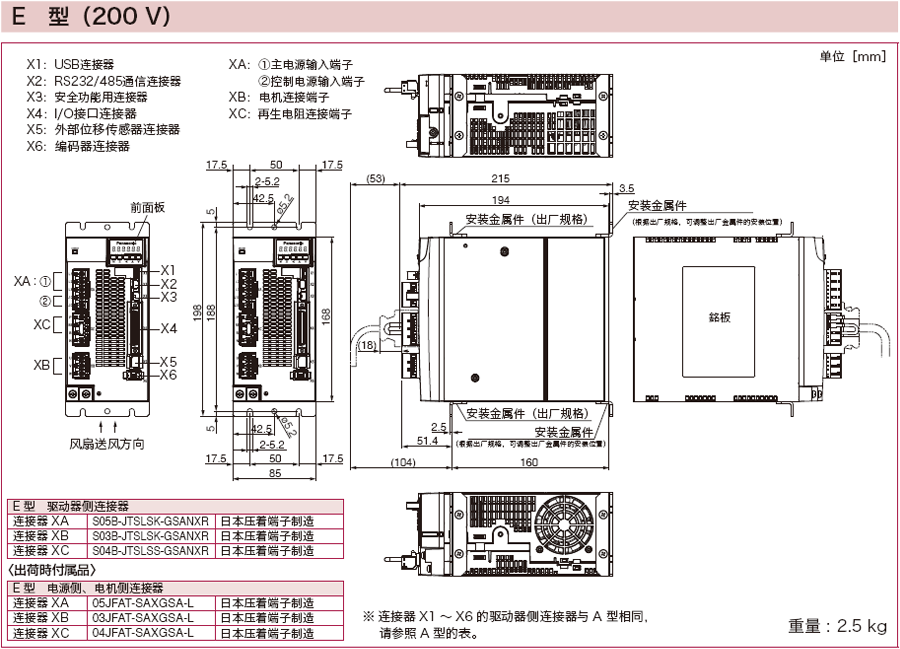
| 回生 | A 型, B 型:無內置再生電阻(只有外置) C 型~F 型:內置再生電阻(可外置) | |||
| 動態制動器 | A 型~F 型:內置 | |||
| 控制模式 | ①位置控制 ②速度控制 ③轉矩控制 ④位置/速度控制 ⑤位置/轉矩控制 ⑥速度/轉矩控制 ⑦全閉環控制 7個模式通過參數進行切換 | |||
※1 請注意,溫度降低時濕度上升,容易產生結露。
功能
| 項目 | 功能 | ||
|---|---|---|---|
| 控制輸入 | ①伺服使能開啟輸入 ②報警清除輸入 ③增益切換輸入 ④正方向驅動禁止輸入 ⑤負方向驅動禁止輸入 ⑥強制報警輸入 ⑦慣量比切換輸入 | ||
| 控制輸出 | ①伺服報警輸出 ②伺服準備輸出 ③外部制動器解除信號 ④速度到達輸出 ⑤轉矩限制中信號輸出 ⑥零速檢出信號 ⑦警告輸出 ⑧報警清除屬性輸出 ⑨伺服使能開啟狀態輸出 | ||
| 位置控制 | 控制輸入 | ①偏差計數器清除 ②指令脈沖禁止輸入 ③指令分倍頻切換 ④制振控制切換 ⑤轉矩限制切換 ⑥控制模式切換 | |
| 控制輸出 | ①定位完成 ②有無位置指令輸出 | ||
| 脈沖 輸入 |
*大指令脈沖頻率 | 500 kpps(使用光電耦合器輸入時) 8 Mpps(使用長線接收器輸入、4 倍頻時) |
|
| 輸入脈沖信號形態 | 差動輸入。通過參數可進行選擇。(①正方向/負方向 ②A相/B相 ③指令/方向) | ||
| 指令脈沖分倍頻(電子齒輪比設置) | 指令脈沖頻率×電子齒輪比 作為位置指令輸入進行處理。但是,請在電子齒輪比為1/1000倍~8000倍的情況下使用。 作為位置指令輸入進行處理。但是,請在電子齒輪比為1/1000倍~8000倍的情況下使用。 |
||
| 平滑濾波器 | 針對指令輸入,可選擇一次延遲濾波器或者FIR 型濾波器。 | ||
| 模擬輸入 | 轉矩限制指令輸入 | 可單獨進行各方向的轉矩限制。 | |
| 轉矩前饋輸入 | 可通過模擬電壓輸入轉矩前饋。 | ||
| 2自由度控制 | 可使用 | ||
| 制振控制 | 可使用 | ||
| 負載變動抑制控制 | 可使用 | ||
| 速度控制 | 控制輸入 | ①內部指令速度選擇 ②零速箝位 ③速度指令符號輸入 ④控制模式切換 | |
| 控制輸出 | ①速度一致輸出 ②有無速度指令輸出 | ||
| 模擬輸入 | 速度指令輸入 | 通過模擬電壓可進行速度指令輸入。 位移傳感器設定及指令極性根據參數而定。(6 V/額定轉速 標準出廠設置) |
|
| 轉矩限制指令輸入 | 可單獨進行各方向的轉矩限制。 | ||
| 轉矩前饋輸入 | 可通過模擬電壓輸入轉矩前饋。 | ||
| 內部速度指令 | 可根據控制輸入切換內部速度8速。 | ||
| 軟啟動/斷電功能 | 0s ~10s / 1000r/min 可單獨設定加速、減速,也可設定S字加減速。 | ||
| 零速箝位 | 根據零速箝位可將內部速度指令速度箝位為零。 | ||
| 2自由度控制 | 可使用 | ||
| 轉矩控制 | 控制輸入 | ①零速箝位 ②轉矩指令符號輸入 ③控制模式切換 | |
| 控制輸出 | ①速度一致輸出 ②速度限制中輸出 | ||
| 模擬輸入 | 轉矩指令輸入 | 可通過模擬電壓輸入轉矩指令。 位移傳感器設定及指令極性根據參數而定。(3 V/額定轉矩 標準出廠設定) |
|
| 速度限制功能 | 可根據參數設定速度限制值。 | ||
| 全閉環 控制 |
控制輸入 | ①偏差計數器清零 ②指令脈沖禁止輸入 ③指令分倍頻切換 ④制振控制切換 ⑤轉矩限制切換 | |
| 控制輸出 | ①定位完成 ②位置指令有無輸出 | ||
| 脈沖 輸入 |
*大指令脈沖頻率 | 500 kpps(光電耦合器輸入) 8 Mpps(使用器線接收器輸入、4 倍頻時) |
|
| 輸入脈沖列形態 | 差動輸入。可根據參數進行選擇。(①正/負 ② A相/B相 ③指令/方向) | ||
| 指令脈沖分倍頻 (電子齒輪比的設置) |
指令脈沖頻率×電子齒輪比作為位置指令進行處理。但是,請在電子齒輪比為1/1000倍~8000倍的情況下使用。 |
||
| 平滑濾波器 | 針對指令輸入,可選擇一次延遲濾波器或者FIR 型濾波器。 | ||
| 模擬輸入 | 轉矩限制指令輸入 | 可單獨進行正/負方向的轉矩限制。 | |
| 轉矩前饋輸入 | 可通過模擬電壓輸入轉矩前饋。 | ||
| 外部位移傳感器分倍頻設置范圍 | 1/40倍 ~ 1280倍 可在分子=1~223、分母=1~223 的范圍中任意設定編碼器反饋脈沖(分子)與外部位移傳感器(分母)的比,請在以上范圍內使用。 |
||
| 2自由度控制 | 可使用 | ||
| 制振控制 | 可使用 | ||
| 共通 | 自動調整 | 可根據來自上位的動作指令以及安裝支持軟件“PANATERM”的動作指令下的電機驅動狀態,實時識別負載慣性并自動設置相應剛性的增益。 | |
| 反饋脈沖的分頻功能 | 可任意設定脈沖數。(編碼器的脈沖數為*大值) | ||
| 保護功能 | 硬件錯誤 | 過電壓、電壓不足、過速度、超載、過熱、過電流、編碼器異常等。 | |
| 軟件錯誤 | 位置偏差過大、指令脈沖分頻、EEPROM異常等。 | ||
| 報警數據跟蹤功能 | 可參照報警履歷。 | ||
基本規格
| 項目 | 功能 | |||
|---|---|---|---|---|
| 輸入電源 | 100 V | 主電路電源 | 單相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | |
| 控制電路電源 | 單相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | |||
| 200 V | 主電路電源 | A型~D型 | 單相/三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |
| E型, F型 | 三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| 控制電路電源 | A型~D型 | 單相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||
| E型, F型 | 單相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| 使用環境條件 | 溫度 | 使用溫度 0 ℃~55 ℃(無結露) 保存溫度 -20 ℃~65 ℃(*高溫度保證:80 ℃ 72小時 無結露※1) |
||
| 濕度 | 使用、保存時都需保持在20 %~85 % RH 以下(無結露※1) | |||
| 海拔 | 海抜1000 m 以下 | |||
| 振動 | 5.88 m/s2 以下,10 Hz ~60 Hz | |||
| 控制方式 | IGBT PWM 方式 正弦波驅動 | |||
| 編碼器反饋脈沖 | 23 bit(8388608 分辨率)7線串行絕對式編碼器 ※以增量式系統(不使用多圈數據)使用的情況下,無需連接絕對式編碼器用電池,將參數Pr0.15 設置為「1」(出廠設置)即可使用。 |
|||
| I/O連接器 | 控制信號 | 輸入 | 通用10輸入 根據參數選擇通用輸入功能 |
|
| 輸出 | 通用6輸出 根據參數選擇通用輸入功能 |
|||
| 模擬信號 | 輸入 | 無 | ||
| 輸出 | 2輸出(模擬監視器輸出2) | |||
| 脈沖信號 | 輸入 | 2輸入(光電耦合器輸入、線接收器輸入) | ||
| 輸出 | 4輸出(長線驅動輸出3、集電極電路輸出1) | |||
| 通信功能 | USB | 與電腦連接設定參數或監視狀態。 | ||
| 前面板 | ①按鍵 5 個 ②LED 6 位 | |||
| 再生 | A 型, B 型:無內置再生電阻(只有外置) C 型~F 型:內置再生電阻(可外置) | |||
| 動態制動器 | 內置 | |||
| 控制模式 | ①位置控制 ②內部速度控制 ③位置/內部速度控制 | |||
※1 請注意,溫度降低時濕度上升,容易產生結露。
功能
| 項目 | 功能 | ||
|---|---|---|---|
| 位置 控制 |
控制輸入 | ①偏差計數器清除 ②指令脈沖輸入禁止 ③指令分倍頻切換 ④制振控制切換等 | |
| 控制輸出 | 定位完成 等 | ||
| 脈沖 輸入 |
*大指令脈沖頻率 | 500 kpps(使用光電耦合器時) 8 Mpps(驅動長線接收器輸入時) | |
| 輸入脈沖信號形態 | 差動輸入。根據參數可進行選擇。(①正方向/負方向 ②A相/B相 ③指令/方向) | ||
| 指令脈沖分倍頻 (電子齒輪比設置) |
指令脈沖頻率×電子齒輪比作為位置指令輸入進行處理。但是,請在電子齒輪比為1/1000倍~8000倍的情況下使用。 |
||
| 平滑濾波器 | 針對指令輸入,可選擇一次延遲濾波器或者FIR 型濾波器。 | ||
| 制振控制 | 可使用 | ||
| 2自由度控制 | 可使用 | ||
| 內部速度控制 | 控制輸入 | 內部速度選擇1、內部速度選擇2、內部速度選擇3、零速箝位等 | |
| 控制輸出 | 速度到達等 | ||
| 內部速度指令 | 根據控制輸入可切換內部速度8速 | ||
| 軟啟動/斷電功能 | 0~10 s/1000 r/min 可單獨設定加速、減速,也可設定S形加減速。 | ||
| 零速箝位 | 速根據零速箝位可將內部速度指令速度箝位為零。 | ||
| 2自由度控制 | 可使用 | ||
| 共通 | 自動調整 | 可根據來自上位的動作指令以及安裝支持軟件“PANATERM”的動作指令下的電機驅動狀態,實時識別負載慣性并自動設置相應剛性的增益。 | |
| 反饋脈沖的分頻功能 | 任意設定脈沖數。(編碼器的脈沖數為*大值) | ||
| 保護 功能 |
硬件錯誤 | 過電壓、電壓不足、過速度、超載、過熱、過電流、編碼器異常等。 | |
| 軟件錯誤 | 位置偏差過大、指令脈沖分頻、EEPROM異常等。 | ||
| 報警數據跟蹤功能 | 可參照報警履歷。 | ||
品類齊全
省心省力,一站購齊
一對一客服
選型詢價,快速響應
貨期保障
多倉直發,貨期無憂
正品貨源
正品保障,誠信服務
 在線客服
在線客服
 企業微信
企業微信







 [VIP第5年] 指數:4
[VIP第5年] 指數:4 通過認證
通過認證