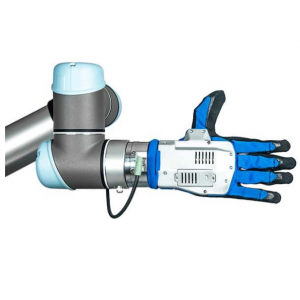
qb SoftHand Research是一種基于軟機器人技術的擬人機器人手,它靈活、適應性強、能夠與周圍環境、物體和人類互動,同時降低了傷害操作員、破壞待處理產品和損壞機器人的風險。
qb SoftHand Research具有靈活的適應性,可以在不改變控制動作的情況下抓取不同的物體,展現出***的簡潔性和靈活性。
由于其柔軟的性質,我們在設計qbrobotics夾爪時,將簡約與內部智能進行了有機結合,不僅可確保意外人機交互的安全性,而且還適于在不改變控制動作的情況下抓取不同的物體。
借助這些創新,夾爪**靈活,可以抓取各種各樣的物體。單電機驅動使夾爪能做到即插即用,同時也易于控制(單個電機需要一個控制信號來關閉和打開整只手),并且價格合理.
特點
- 靈活、適應性強且功能強大
- 19級擬人自由度、協同設計、單電機
- 可脫位、自我修復的手指關節
- 抓力62牛(夾點配置)
- 標稱有效載荷1.7千克(夾點配置)
- 從手掌完全張開到握緊拳頭,僅需1.1秒
- USB和RS485接口
- ROS兼容
- 重量:500克
- 反饋:電機位置和電機電流
工作方式
The qb SoftHand Research can adapt the grasp from a mechanical point of view using two configurations:
使用提供的連接法蘭安裝夾爪,并按照手冊規定連接電纜。
將USB閃存盤插入機器人的示教器中,以安裝URCaps插件。


 在線客服
在線客服
 企業微信
企業微信







 [VIP第2年] 指數:7
[VIP第2年] 指數:7 通過認證
通過認證